Comment démonter les cinq ou six axes du robot Eston?
Publié:2023-07-20 09:50:04
1. Ouvrez la coque du robot pour révéler la base du moteur.
2. Utilisez un tournevis ou une clé pour retirer les vis sur la base du moteur.
3. Retirez la vis, soulevez la base du moteur et retirez-la du robot.
4. La base du moteur est étroitement liée au robot, et la clé et d'autres outils sont utilisés pour abaisser la base du moteur afin de la libérer du robot.

-
 202304-14
202304-14Onduleur Delta pour réduire le taux de défaillance
Vérification quotidienne Point 1 de la réparation du problème du convertisseur de fréquence Delta :Vérifiez si le son du moteur est anormal pendant le fonctionnement, y compris si le moteur vibre···
-
 202410-21
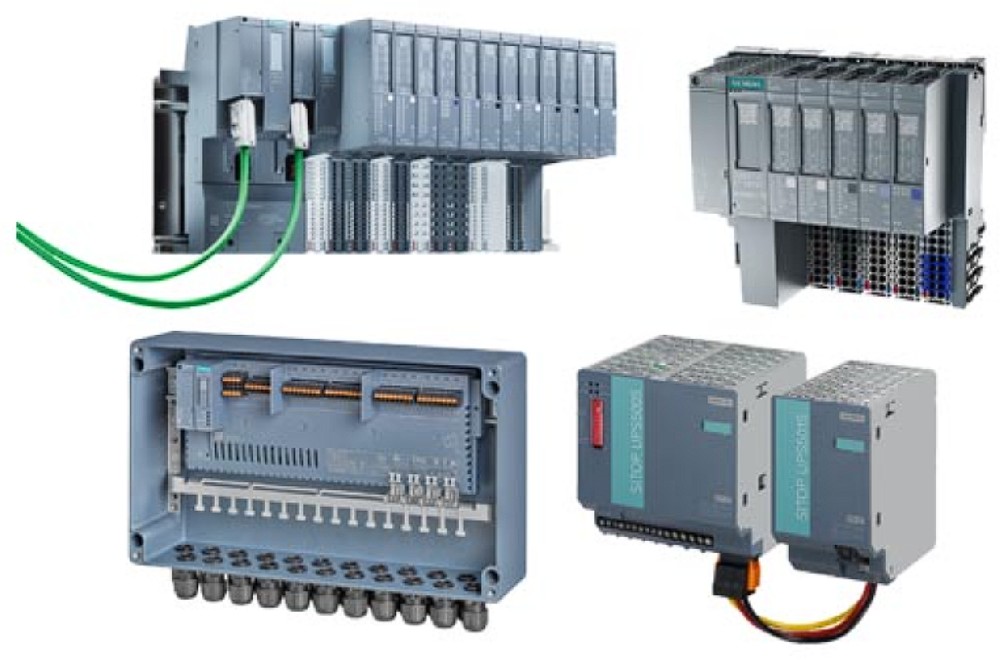
202410-21Modules d'entrée et de sortie: tout ce que vous devez savoir
Le module d'E / S (Input / Output Module) gère la communication entre le CPU et le réseau, y compris le transfert de données, la gestion de la charge d'alimentation et le contrôle des fonctions de···
-
 202302-07
202302-07Comment puis-je définir l'adresse IP de l'écran tactile
Comment définir l'adresse IP lorsque l'écran tactile est en cours d'utilisationPar exemple : CMT2109X2 et CMT2079XTout d'abord -> ; Cliquez sur le petit bouton jaune sur l'écran tactileSuivant -> ;···
-
 202301-06
202301-06Schneider interrupteur d'isolement fonctionnement essentiel
Caractéristiques de l'interrupteur barrière Schneider : Tout d'abord, l'interrupteur barrière Schneider peut être utilisé pour bloquer l'alimentation électrique, il peut déconnecter les équipe···
-
 202302-27
202302-27Servomoteur Delta comment choisir?
Dans la sélection du servomoteur Delta, en principe doit être basé sur les conditions de charge à choisir. Il existe deux types de charges sur l'arbre du moteur, à savoir le couple d'amortissemen···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com Bâtiment 26, communauté de Liyuan, district de Chaoyang, Pékin, Chine
Bâtiment 26, communauté de Liyuan, district de Chaoyang, Pékin, Chine