Comment choisir le relais Omron
Publié:2023-01-13 16:47:15
1, sélectionnez le courant de travail nominal de la bobine de relais électromagnétique : relais électromagnétique DC entraîné par transistor ou circuit intégré, le courant de travail nominal de la bobine (généralement 2 fois le courant d'aspiration) doit être dans la plage de courant de sortie du circuit d'entraînement.
2. Sélectionnez le type de contact et la charge de contact du relais électromagnétique : le même type de relais a généralement une variété de formes de contact pour la sélection (le relais électromagnétique a : contact de groupe simple, contact de groupe double, contact de groupe multiple et contact normalement ouvert, contact normalement fermé, etc.), doit choisir le type de contact adapté au circuit d'application.
3. Sélectionnez la tension d'alimentation de la bobine de relais électromagnétique : Lors de la sélection du relais électromagnétique, la première chose à choisir est de savoir si la tension d'alimentation de la bobine de relais est AC ou DC. En général, la tension de fonctionnement nominale d'un relais doit être inférieure ou égale à la tension de fonctionnement de son circuit de commande.
4, choisissez le volume approprié du relais électromagnétique : la taille du volume du relais Omron est généralement liée à la taille de la charge de contact du relais Omron. La taille du relais doit être sélectionnée en fonction des exigences du circuit d'application.

-
 202410-21
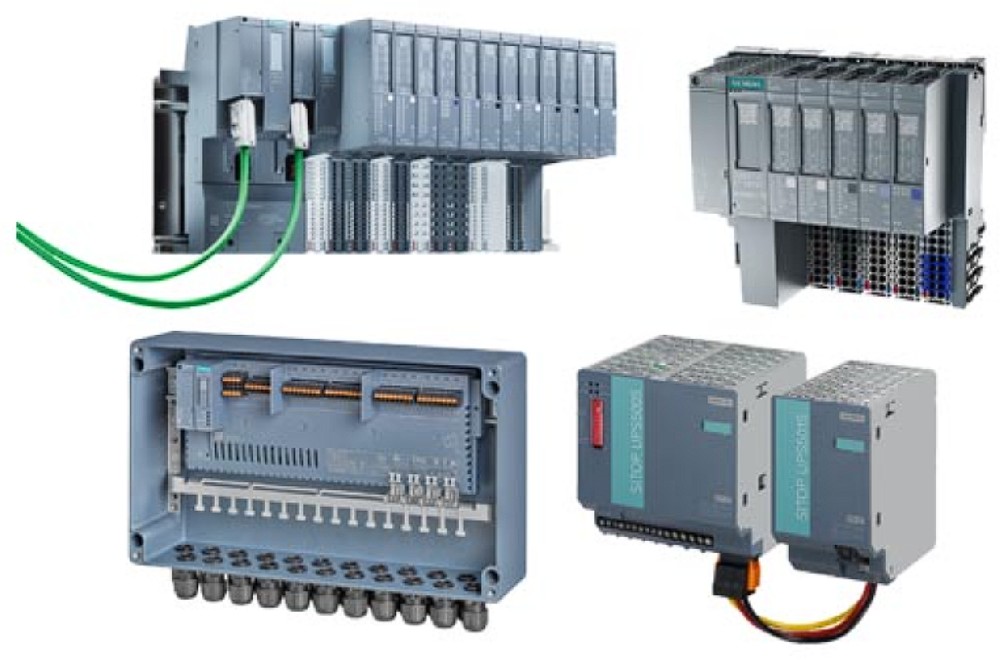
202410-21Modules d'entrée et de sortie: tout ce que vous devez savoir
Le module d'E / S (Input / Output Module) gère la communication entre le CPU et le réseau, y compris le transfert de données, la gestion de la charge d'alimentation et le contrôle des fonctions de···
-
 202302-24
202302-24Écran tactile WEINVIEW défauts courants et entretien
(1) L'indicateur de démarrage est normal, mais l'affichage ne montre aucune entrée de signal (écran noir) ;(2) Appuyez sur la touche on, l'hôte n'a aucune réponse (le voyant n'est pas lumineux, l···
-
 202307-20
202307-20Défauts courants et méthodes de traitement du régulateur de température rkc
1, l'indicateur de puissance est normal, mais le contrôleur de température n'a pas d'affichage d'écran. Ce défaut est principalement causé par le contrôleur de température sur le régulateur de···
-
 202212-29
202212-29Schneider petit disjoncteur et interrupteur de fuite différence
1. Définition de mini disjoncteurOccupation électrique pour MCB court, adapté à la communication 50 / 60Hz tension supplémentaire 230 / 400V, courant supplémentaire à la surcharge de ligne 63A ···
-
 202301-29
202301-29Le rôle de l'instrument Schneider dans le processus de séparation de l'air
La surface de l'instrument joue un rôle important dans l'équipement de séparation de l'air et le processus de purification des gaz. Elle est essentielle pour le réglage du processus de séparation···


 +86 18621383628
+86 18621383628 +86 13811814778
+86 13811814778
 Bâtiment 26, communauté de Liyuan, district de Chaoyang, Pékin, Chine
Bâtiment 26, communauté de Liyuan, district de Chaoyang, Pékin, Chine